用Arduino驱动步进电机:一步步带你玩转自动化世界
在DIY和电子制作的世界里,步进电机以其精准的控制和简单的驱动方式,成为了许多项目的理想选择。而Arduino,这个开源的微控制器平台,凭借其易用性和丰富的资源,成为了驱动步进电机的绝佳伙伴。今天,我们就来详细聊聊如何用Arduino驱动步进电机,让你轻松踏入自动化的世界。

步进电机,顾名思义,就是可以按步数精确控制的电机。它不像普通直流电机那样连续旋转,而是每一步只转动一个固定的角度。这种特性使得步进电机非常适合需要精确位置控制的场合,比如打印机、机器人关节、精密测量仪器等。
步进电机通常有两种类型:二相和四相。四相步进电机是最常见的,它们有四组线圈,通过依次通电和断电,可以实现电机的步进运动。
在开始动手之前,我们需要准备以下材料:
Arduino开发板(如Arduino Uno)
步进电机(以四相步进电机为例)
步进电机驱动器(如ULN2003、A4988等)
电源(为步进电机和驱动器供电)
连接线(如杜邦线)
面包板(用于连接电路)
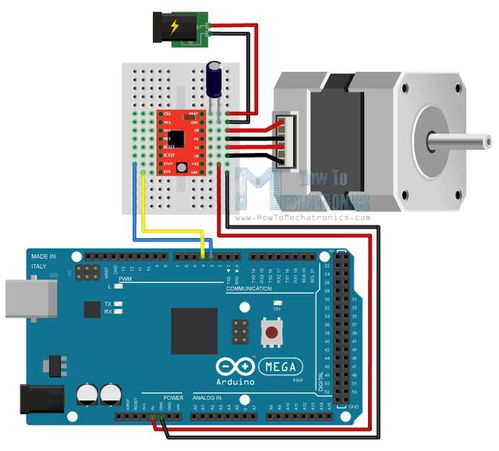
1. 连接步进电机和驱动器
四相步进电机通常有四个引脚(A、B、C、D),它们分别对应驱动器上的四个输入端。将电机的这四个引脚依次连接到驱动器的IN1、IN2、IN3、IN4上。注意,连接时要确保引脚顺序正确,否则电机可能无法正常工作。
2. 连接驱动器和Arduino
驱动器通常有四个控制引脚(通常是DIR、PULSE、ENA、GND),以及电源引脚(VCC、GND)。将DIR(方向控制)和PULSE(脉冲信号)连接到Arduino的数字引脚(如D2和D3),ENA(使能引脚)连接到Arduino的数字引脚(如D4),并通过一个电阻(如220Ω)连接到VCC(电源正极)。GND引脚连接到Arduino的GND。
3. 连接电源
步进电机和驱动器需要外部电源供电。将电源的正极连接到驱动器的VCC引脚,负极连接到GND引脚。同时,确保Arduino也连接到相同的电源负极(共地),以保证电路的正常工作。
接下来,我们需要编写Arduino代码来控制步进电机的运动。这里以Arduino Uno和A4988驱动器为例,展示一个简单的代码示例。
```cpp
// 定义引脚
const int dirPin = 2; // 方向控制引脚
const int stepPin = 3; // 脉冲信号引脚
const int enPin = 4; // 使能引脚
// 设置步数(每转一圈的步数)
const int stepsPerRevolution = 2048; // 对于28BYJ-48步进电机,通常为2048步/圈
// 设置步进速度(每秒的步数)
const int speed = 20; // 可以根据需要调整速度
void setup() {
// 设置引脚模式
pinMode(dirPin, OUTPUT);
pinMode(stepPin, OUTPUT);
pinMode(enPin, OUTPUT);
// 使能驱动器
digitalWrite(enPin, HIGH);
void loop() {
// 顺时针旋转一圈
clockwise(stepsPerRevolution);
delay(1000); // 等待一秒
// 逆时针旋转一圈
counterclockwise(stepsPerRevolution);
delay(1000); // 等待一秒
// 顺时针旋转指定步数
void clockwise(int steps) {
for(int i = 0; i < steps; i) {
digitalWrite(dirPin, HIGH); // 设置方向为顺时针
digitalWrite(stepPin, HIGH); // 发送一个脉冲信号
delayMicroseconds(speed * 1000 / stepsPerRevolution); // 计算每步的延迟时间
digitalWrite(stepPin, LOW); // 脉冲信号结束
// 逆时针旋转指定步数
void counterclockwise(int steps) {
for(int i = 0; i < steps; i) {
digitalWrite(dirPin, LOW); // 设置方向为逆时针
digitalWrite(stepPin, HIGH); // 发送一个脉冲信号
delayMicroseconds(speed * 1000 / stepsPerRevolution); // 计算每步的延迟时间
digitalWrite(stepPin, LOW); // 脉冲信号结束
```
1. 引脚定义
在代码的开始部分,我们定义了方向控制引脚(dirPin)、脉冲信号引脚(stepPin)和使能引脚(enPin)。这些引脚分别连接到驱动器的DIR、PULSE和ENA引脚。
2. 设置步数和速度
我们定义了每转一圈的步数(stepsPerRevolution)和步进速度(speed)。对于28BYJ-48步进电机,每转一圈通常需要2048步。速度可以根据需要调整,单位是每秒的步数。
3. 初始化
在`setup()`函数中,我们设置了引脚模式,并使能了驱动器(将enPin设置为高电平)。
4. 主循环
在`loop()`函数中,我们实现了步进电机的顺时针和逆时针旋转。首先,我们调用`clockwise()`函数让电机顺时针旋转一圈,然后等待一秒。接着,调用`counterclockwise()`函数让电机逆时针旋转一圈,再等待一秒。这样,电机就会不断地顺时针和逆时针旋转。
5. 顺时针和逆时针旋转函数
`clockwise()`和`counterclockwise()`函数分别实现了电机的顺时针和逆时针旋转。通过改变方向控制引脚(dirPin)的电平,我们可以控制电机的旋转方向。然后,我们发送一个脉冲信号(将stepPin设置为高电平),并等待一定的时间(根据速度和步数计算得出)。最后,将脉冲信号结束(将stepPin设置为低电平),完成一步的旋转。
在连接好电路并上传代码后,你可能需要对步进电机的运动进行一些调试和优化。以下是一些常见的调试和优化方法:
调整速度:通过改变代码中的速度变量(speed),你可以调整步进电机的旋转速度。
检查引脚连接:确保所有的引脚连接都正确无误,特别是步进电机和驱动器之间的连接。
调整电源:步进电机和驱动器需要稳定的电源供电。如果电源不稳定,可能会导致电机运动不平稳或无法正常工作。
使用外部电源:如果Arduino的供电不足,你可以考虑使用外部电源为步进电机和驱动器供电。
通过本文的介绍,你已经学会了如何用Arduino驱动步进电机。从准备材料、连接电路到编写代码,每一个步骤都详细讲解,让你轻松上手。现在,你可以利用步进电机和Arduino来制作各种有趣的项目了,比如自动门、3D打印机、机器人等。希望这篇文章能对你有所帮助,让你在DIY和电子制作的道路上越走越远!


 一相机类型:拍摄美化
一相机类型:拍摄美化本软件是一款功能强大的相机应用,集拍照、录像、图片编辑及多种...
 愤怒的小鸟2万圣节版类型:益智休闲
愤怒的小鸟2万圣节版类型:益智休闲愤怒的小鸟2万圣节版简介 愤怒的小鸟2万圣节版是一款策略冒...
 五大灵童美化包类型:实用工具
五大灵童美化包类型:实用工具五大灵童美化包是一款专为游戏爱好者设计的视觉美化工具,它允许...
 旅搭类型:出行导航
旅搭类型:出行导航旅搭是一款专为旅行爱好者设计的综合服务平台,集行程规划、景点...
 动森助手官方版类型:实用工具
动森助手官方版类型:实用工具动森助手官方版是一款专为《动物之森》(Animal Cros...
98.42M柿子电影播放器
79.52M华为浏览器安卓app
126.75M云闪付app下载安装
145.99M今日影视官方app
50.29M召唤骑士团内置菜单版
77.44M惊悚躲猫猫
55.40M长安汽车app
174.83M小米音乐免费版
70.95M放置史莱姆
50.65M运营大师
本站所有软件来自互联网,版权归原著所有。如有侵权,敬请来信告知 ,我们将及时删除。 粤ICP备2026014863号-2
 柿子电影播放器
柿子电影播放器
 华为浏览器安卓app
华为浏览器安卓app
 云闪付app下载安装
云闪付app下载安装
 今日影视官方app
今日影视官方app
 召唤骑士团内置菜单版
召唤骑士团内置菜单版
 惊悚躲猫猫
惊悚躲猫猫
 长安汽车app
长安汽车app
 小米音乐免费版
小米音乐免费版
 放置史莱姆
放置史莱姆
 运营大师
运营大师